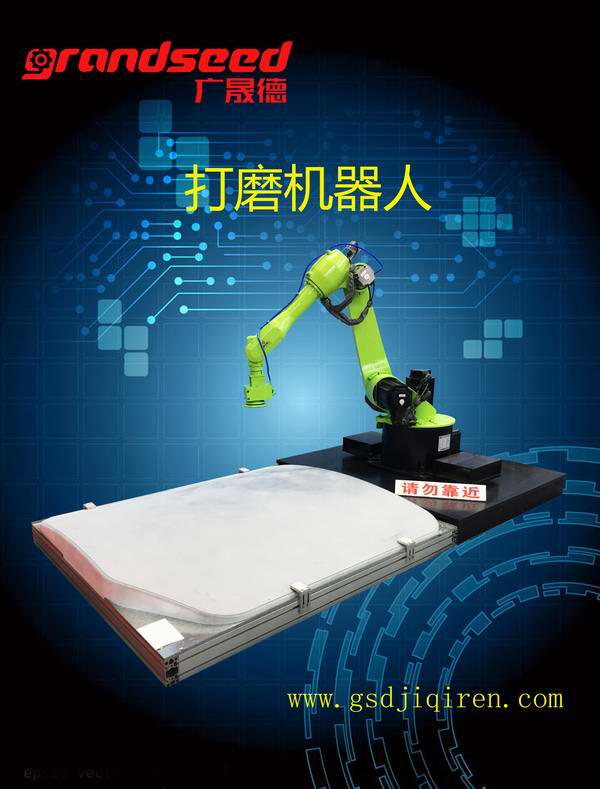
电脑智能操作系统,自动化程度高,性能稳定;可手动设置步骤、速度、高度、间距等基本参数;
文本显示操作界面,操作简单明了;自带紧急保护功能,防止误操作,保护人身安全;
采用先进烤漆工艺,外观简单、大方、实用;部分产品系统终生免费升级;

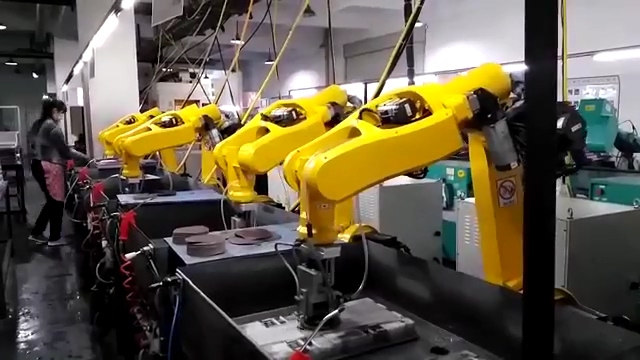
目前松乐深圳生产基地面积超过3500平米,工程师10余名,一线生产员工70余名,规模持续扩大中,能充分满足国内外市场需求;
公司建立有一整套、成熟的、完整的生产流程,流水化作业,配合自有的先进生产设备和技术,效率不断提高、产能成倍增长,现已通过ISO9001体系认证;

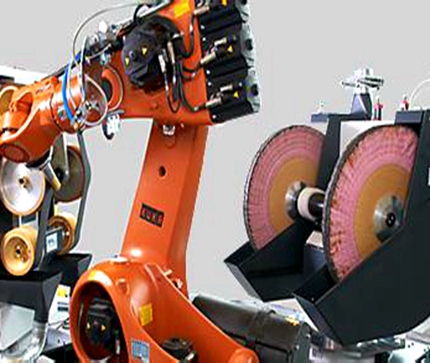
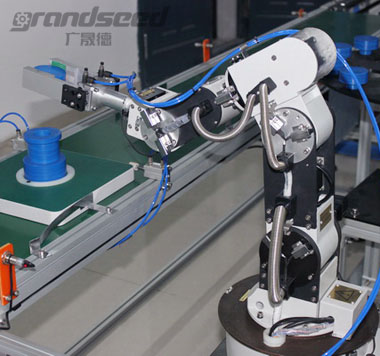
机器人采用分段设计,客户可根据需要选择,自由组合;除此以外,还也接受特种机型定制,为客户提供专业解决方案;
除深圳总部外,在青岛、苏州、成都成立展示中心,客户可就近看样、采买;所有产品按行业细分,包含低中高多价位任选;厂家直供,价格优惠;

以深圳为据点,在苏州、青岛、新疆、成都、香港等地设立技术支持中心,服务网络覆盖全国;
易损件、零配件储备,保证客户24小时内能买到紧急替换件,大程度降低损失;
一年免费保修,终生跟踪维护,定期检查保养,以检代修,替客户节省费用;
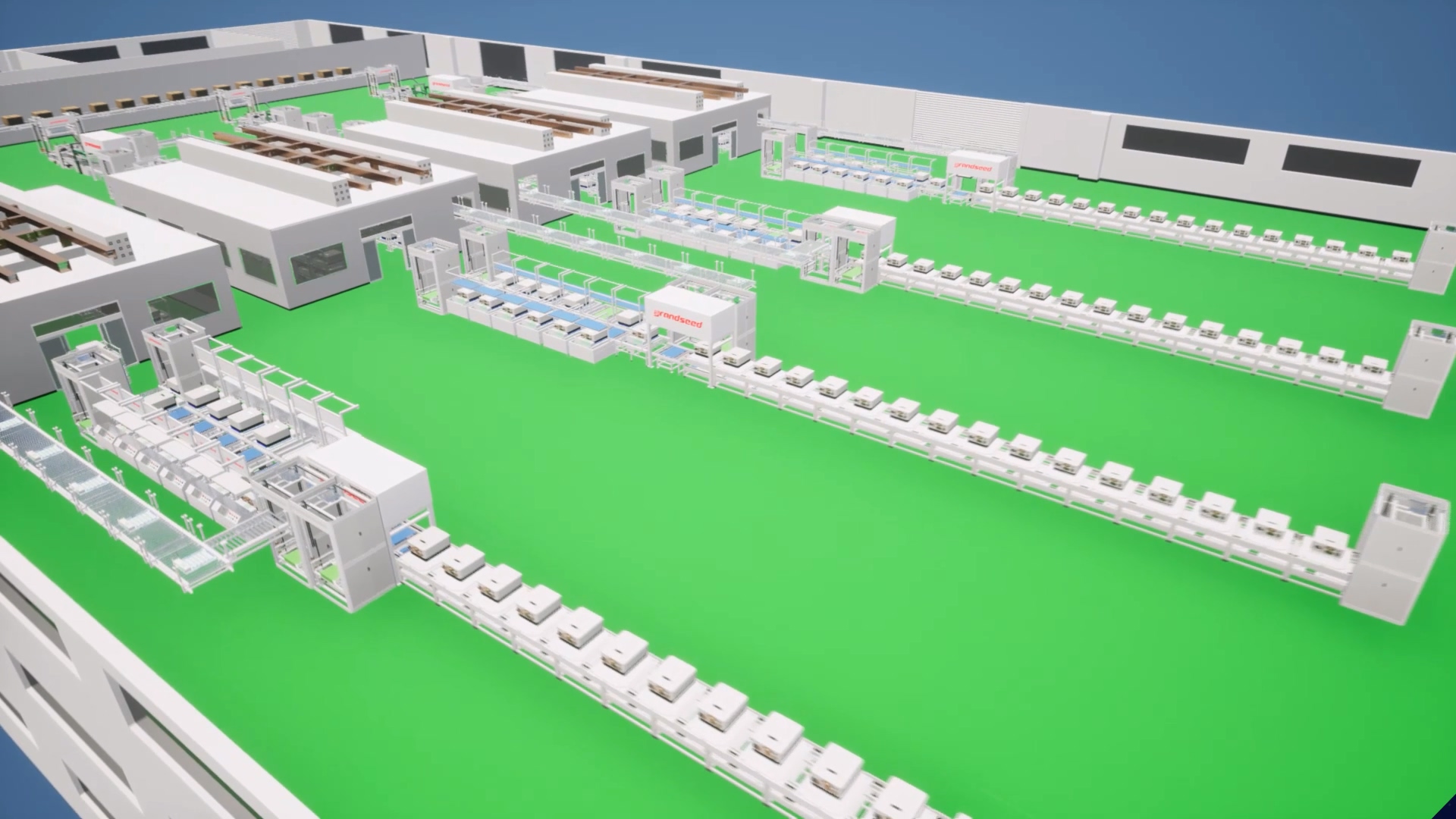
beplay平台入口app ,成立于2015年,主营产品:AGV智能仓储规划路径;机器人柔性智能生产线;激光焊接机器人工作站;新能源组装老化测试运输仓储解决方案,是一家集研发、生产、销售为一体的国级高新技术企业,目前公司拥有三十多项知识产权,企业为最终实现“让人类轻松工作,快乐生活”的伟大使命而不断突破创新。
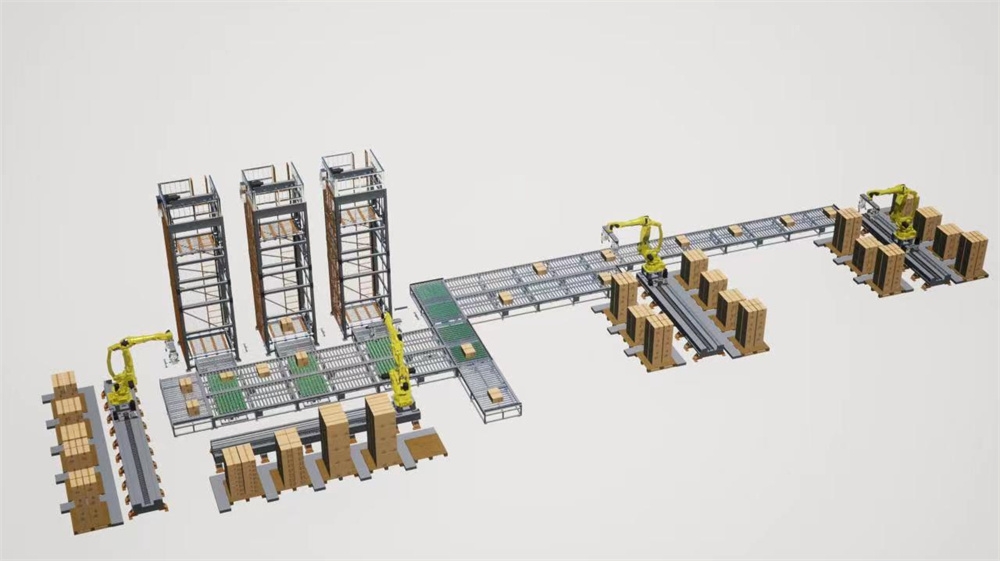
码垛机器人一般用于生产线的末端,把袋装、箱装、桶装等物料从生产线上按照已经设置好的规则码垛到托盘,再经叉车存放到仓库。根据不同的产品类型和实际需求,可以对码垛机器人进行编程,使其适...
2023-09-08新能源储能电池PACK自动生产线是一种将电芯、电池模块、电池管理系统等组件进行组装、测试、包装等过程的自动化生产线。该生产线采用了先进的机器人、自动化设备、测试仪器等,以实现高效、高精...
2023-07-213.15消费者权益日是消费者维权的日子,也是厂商反思自身质量管理体系的重要节点。工业机器人企业在这个节点上需要更加注重产品质量和品牌形象的建设,以实现企业的高质量发展。松乐智能装备认为...
2023-03-15新能源自动生产线主要有两大类:一种是用来生产新能源电池的自动生产线,另一种是用来生产新能源逆变器或者变压器的自动生产线。松乐智能装备专业研发、生产:新能源逆变器自动化生产线和新能源...
2023-03-13
















扫一扫关注官方微信
 4000-599-111
4000-599-111